mirror of
https://github.com/uhi22/pyPLC.git
synced 2025-01-19 01:46:37 +00:00
docu fix: evseMode.md removed unintended chapters
This commit is contained in:
parent
939613d255
commit
afdbf2fa32
1 changed files with 0 additions and 99 deletions
|
|
@ -31,102 +31,3 @@ On the laptop, just run `python pyPlc.py E`.
|
|||

|
||||

|
||||
|
||||
|
||||
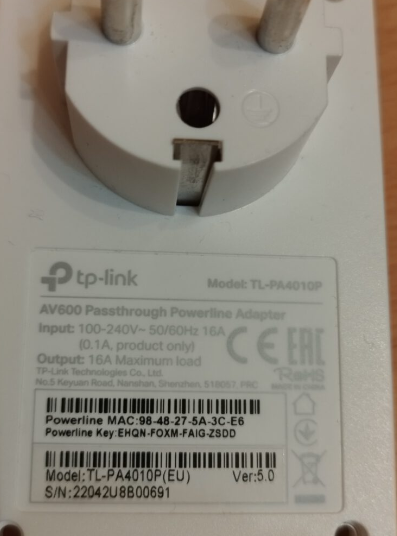
### TPlink TL-PA4010P
|
||||
This adaptor was suggested by https://openinverter.org/forum/viewtopic.php?p=37085#p37085 and there,
|
||||
successfully used to establish a communication to the CCS charger.
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||

|
||||
|
||||
|
||||
Pro:
|
||||
* Can be configured as pev and as EVSE, using two different configuration files (created and patches with github.com/qca/open-plc-utils)
|
||||
* Is able to transmit and receive the SLAC messages, if the special config files are used.
|
||||
|
||||
Contra:
|
||||
* In original parametrization, does not support SLAC (not routed from RF to Ethernet, and not vice versa).
|
||||
* Depending on the configuration, only one direction of the SLAC is routed from RF to Ethernet. Means: Not suitable for sniffing the complete
|
||||
SLAC sequence.
|
||||
|
||||
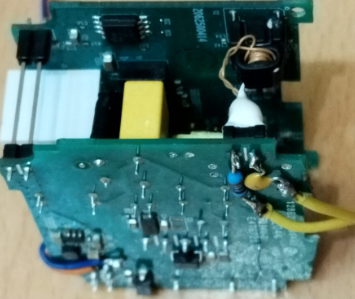
Power supply: Originally, it has 12V internal supply. There is a DC/DC step down converter included, which supplies the chipset with 3.3V.
|
||||
Works on the original 12V supply line also with 13V/110mA, 10V/120mA, 6V/190mA, and, which reduced RF output power, down to 5V/220mA and even 4V/240mA.
|
||||
Just supplying 5V from an USB power bank at the original 12V line works fine. The only drawback is a slightly reduced transmit power, because
|
||||
the RF transmitter is connected to the 12V, but is is no issue, because it has anyway much too much transmit power for the CCS use case.
|
||||
|
||||
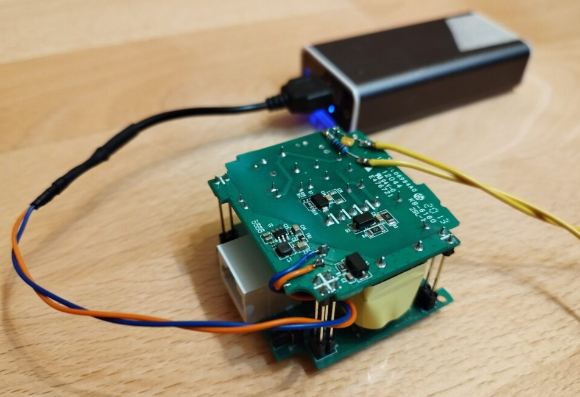
How to modify:
|
||||
- remove the housing
|
||||
- remove the AC power connector parts
|
||||
- connect cables to supply the device. Works with 12V, also works with 5V from an USB power bank.
|
||||
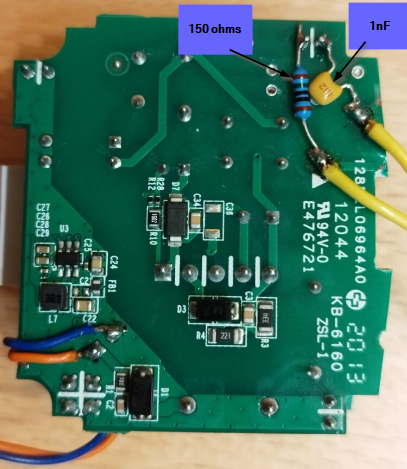
- connect cables and circuit (1nF and 150ohms in series) for connecting to the pilot line.
|
||||
|
||||
## Controller for the PEV
|
||||
|
||||
Besides the homeplug modem, there are additional parts necessary for a vehicle to perform CCS charging. Two of these are: 1. The inlet voltage measurement. 2. The control of CP state and relays.
|
||||
|
||||
### DieterHV
|
||||
|
||||
This is the high-voltage Dieter. It is responsible to measure the CCS inlet voltage. DieterHV is an Arduino Pro Mini, running the software from https://github.com/uhi22/dieter, and DieterHV has a quite simple task: Measure the divided voltage from the CCS inlet, and write the output of the ADC to the serial line, with 19200 Baud. The hardware includes a 5V-to-5V-DCDC converter (e.g. B0505S-1W) and a PC900V optocoupler. In the current version, the ADC0 is the main channel, and the ADC1 gets half of the voltage and may be used for plausibilization. Potential improvement could be, to enable also negative voltage measurement, to be able to detect wrong polarity.
|
||||
|
||||

|
||||

|
||||
|
||||
### DieterLV
|
||||
|
||||
This is the low-voltage Dieter. It controls the ControlPilot state, by switching an additional 1.2kOhm resistor in parallel to the permanently connected 2.7kOhm. Additionally, the DieterLV controls two relays via simple drivers. In the demo, these relays connect the DC from the CCS inlet to a light bulb.
|
||||
Also DieterLV is an Arduino Pro Mini, and it is running the same software as DieterHV. It receives the output control requests via serial line with 19200 Baud, and sets its digital outputs accordingly.
|
||||
|
||||

|
||||
|
||||
### OLED Display
|
||||
|
||||
To show the status, the voltage and the SOC in PEV mode, there is an OLED display connected to the serial line of the USB-to-serial-converter.
|
||||
The display is programmed to receive data via serial line and show three lines. The python script is using the function self.hardwareInterface.showOnDisplay(s, strAuxInfo1, strAuxInfo2)
|
||||
to fill these three lines on the display.
|
||||
|
||||
The display is an ESP32-powered board named "WIFI_KIT-32", available e.g. from
|
||||
https://de.aliexpress.com/item/1005002931025729.html?spm=a2g0o.productlist.main.23.3d607f4fVNGcAr&algo_pvid=338e0303-b3b2-45c7-94b6-4a55bba4009e&algo_exp_id=338e0303-b3b2-45c7-94b6-4a55bba4009e-11&pdp_ext_f=%7B%22sku_id%22%3A%2212000022853967835%22%7D&pdp_npi=3%40dis%21EUR%2113.87%2111.37%21%21%21%21%21%402100b78b16774931785037679d0714%2112000022853967835%21sea%21DE%210&curPageLogUid=TGlYiLzgZW4i
|
||||
|
||||
The arduino sketch is available at https://github.com/uhi22/SerialToOLED
|
||||
|
||||
The connection is simple: The 5V from the USB-to-Serial-converter board are supplying the WIFI_KIT-32, and the TXD of the USB-to-Serial-converter goes via an 1k5 protection resistor to a digital input of the WIFI_KIT_32.
|
||||
|
||||

|
||||
|
||||
|
||||
### USB
|
||||
|
||||
Both, DieterHV and DieterLV communicate with 5V serial line with 19200 Baud. To connect these to the Laptop or Raspberry, we use a cheap USB-to-Serial converter with CP2102, similar to https://www.ebay.de/itm/122447169355?hash=item1c826b874b:g:PKYAAOSwBoVjdS28&amdata=enc%3AAQAHAAAA4IQcw6se5g1eqWsesz2sVJybly8WfWQrHcT%2BKk2kbf3dRjRl5Iimf8p54m2HcnGpjpFaTQqdKE0wrxuPJYLQcmOtofOYlAbClGhlgeIn21NQPaCGzqCSAMAI6yXqfsfCpsBZtJe1%2BfAfIOq1kEPDJBbWD6UFAv6%2FhR%2B6WxeiQKeaVSwc%2BRs87aBn0XbtWmF2p0C9RTURpWQauDpaWLsAthbiVBqBjeNkPQxMSx1AMUa33bO0OZakXjXyHVrGhEXRO7952z1oHjKyl51E0YX7Jqb5hA7GhAs%2BUGvPnBAbjKnH%7Ctkp%3ABFBMipSf-Kdh
|
||||
Its receive path is feed by the DieterHV via optocoupler, and its transmit path is connected to the DieterLV via a protection resistor.
|
||||
On software side, the python module hardwareInterface.py handles the communication with the serial devices.
|
||||
|
||||
## CCS Detector
|
||||
|
||||
In some cases it may help to "hear" the CCS communication, to understand what is going on. For this, a detector receiver can be used,
|
||||
e.g. this one:
|
||||

|
||||
|
||||
By placing the antenna near to the charging cable and just listening, it is possible to differentiate the following cases:
|
||||
* Silence: No communication is going on. No homeplug coordinator is present. No 1kHz PWM is present.
|
||||
* Continuous uniform rattling noise: Homeplug coordinator (charger) is there. Depending on the chargers implementation, this may be quite loud (e.g. Compleo) or less loud (e.g. Alpitronics).
|
||||
* 1kHz tone: The charger provides 1kHz PWM.
|
||||
* Click tones in faster or slower intervals: The communication is ongoing (SLAC, SDP, TCP). Depending on the implementation of the charger and car, this may be very loud (e.g. TPlink modem supplied by 12V) or less loud (some original cars).
|
||||
|
||||
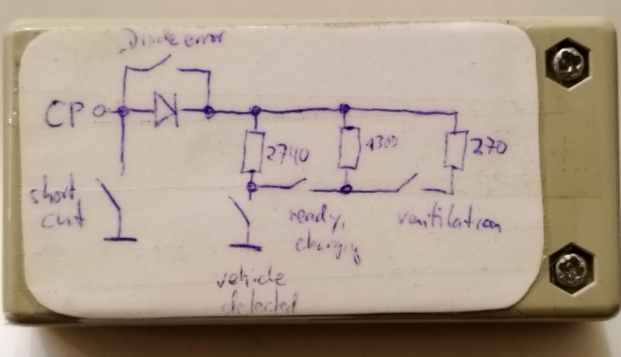
## Electric vehicle simulator
|
||||
|
||||
This device is able to convince an AC charger to deliver power, and also is needed to tell an DC charger, that a car is connected. By closing the "vehicle detected" switch, we pull the CP from 12V to 9V, and the charger will switch to the 5% PWM and starts listening to SLAC parameter request messages. (If DieterLV is controlling the CP, we do not need the EV simulator anymore.)
|
||||
|
||||

|
||||
|
||||
|
||||
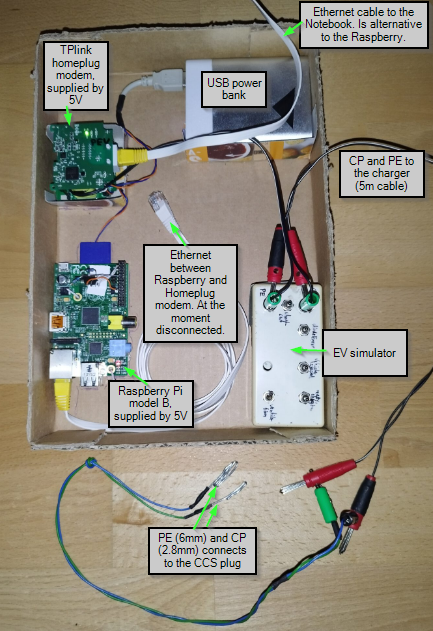
## Combination of EV simulator, HomePlug modem and Raspberry
|
||||
|
||||
|
||||
|
||||
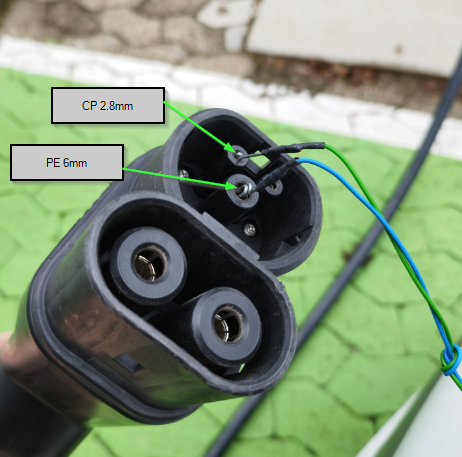
## Connecting to a real-world charger
|
||||
|
||||
|
||||
|
||||
|
|
|
|||
Loading…
Reference in a new issue