35 KiB
SE(3)-Transformers For PyTorch
This repository provides a script and recipe to train the SE(3)-Transformer model to achieve state-of-the-art accuracy. The content of this repository is tested and maintained by NVIDIA.
Table Of Contents
- Model overview
- Setup
- Quick Start Guide
- Advanced
- Performance
- Release notes
Model overview
The SE(3)-Transformer is a Graph Neural Network using a variant of self-attention for 3D points and graphs processing. This model is equivariant under continuous 3D roto-translations, meaning that when the inputs (graphs or sets of points) rotate in 3D space (or more generally experience a proper rigid transformation), the model outputs either stay invariant or transform with the input. A mathematical guarantee of equivariance is important to ensure stable and predictable performance in the presence of nuisance transformations of the data input and when the problem has some inherent symmetries we want to exploit.
The model is based on the following publications:
- SE(3)-Transformers: 3D Roto-Translation Equivariant Attention Networks (NeurIPS 2020) by Fabian B. Fuchs, Daniel E. Worrall, et al.
- Tensor field networks: Rotation- and translation-equivariant neural networks for 3D point clouds by Nathaniel Thomas, Tess Smidt, et al.
A follow-up paper explains how this model can be used iteratively, for example, to predict or refine protein structures:
- Iterative SE(3)-Transformers by Fabian B. Fuchs, Daniel E. Worrall, et al.
Just like the official implementation, this implementation uses PyTorch and the Deep Graph Library (DGL).
The main differences between this implementation of SE(3)-Transformers and the official one are the following:
- Training and inference support for multiple GPUs
- Training and inference support for Mixed Precision
- The QM9 dataset from DGL is used and automatically downloaded
- Significantly increased throughput
- Significantly reduced memory consumption
- The use of layer normalization in the fully connected radial profile layers is an option (
--use_layer_norm), off by default - The use of equivariant normalization between attention layers is an option (
--norm), off by default - The spherical harmonics and Clebsch–Gordan coefficients, used to compute bases matrices, are computed with the e3nn library
This model enables you to predict quantum chemical properties of small organic molecules in the QM9 dataset. In this case, the exploited symmetry is that these properties do not depend on the orientation or position of the molecules in space.
This model is trained with mixed precision using Tensor Cores on NVIDIA Volta, NVIDIA Turing, and the NVIDIA Ampere GPU architectures. Therefore, researchers can get results up to 1.5x faster than training without Tensor Cores while experiencing the benefits of mixed precision training. This model is tested against each NGC monthly container release to ensure consistent accuracy and performance over time.
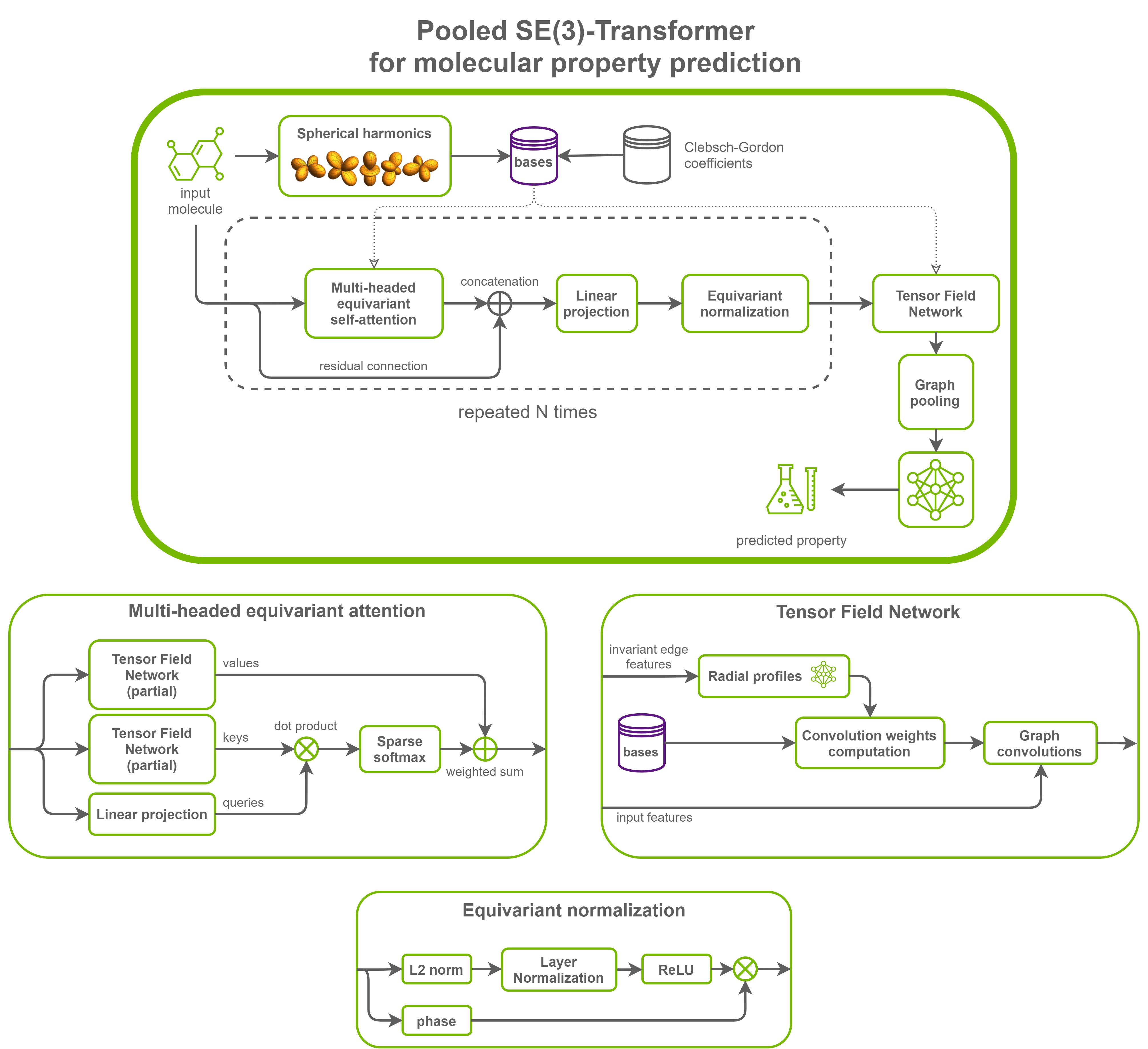
Model architecture
The model consists of stacked layers of equivariant graph self-attention and equivariant normalization. Lastly, a Tensor Field Network convolution is applied to obtain invariant features. Graph pooling (mean or max over the nodes) is applied to these features, and the result is fed to a final MLP to get scalar predictions.
In this setup, the model is a graph-to-scalar network. The pooling can be removed to obtain a graph-to-graph network, and the final TFN can be modified to output features of any type (invariant scalars, 3D vectors, ...).
Default configuration
SE(3)-Transformers introduce a self-attention layer for graphs that is equivariant to 3D roto-translations. It achieves this by leveraging Tensor Field Networks to build attention weights that are invariant and attention values that are equivariant. Combining the equivariant values with the invariant weights gives rise to an equivariant output. This output is normalized while preserving equivariance thanks to equivariant normalization layers operating on feature norms.
The following features were implemented in this model:
- Support for edge features of any degree (1D, 3D, 5D, ...), whereas the official implementation only supports scalar invariant edge features (degree 0). Edge features with a degree greater than one are concatenated to node features of the same degree. This is required in order to reproduce published results on point cloud processing.
- Data-parallel multi-GPU training (DDP)
- Mixed precision training (autocast, gradient scaling)
- Gradient accumulation
- Model checkpointing
The following performance optimizations were implemented in this model:
General optimizations
- The option is provided to precompute bases at the beginning of the training instead of computing them at the beginning of each forward pass (
--precompute_bases) - The bases computation is just-in-time (JIT) compiled with
torch.jit.script - The Clebsch-Gordon coefficients are cached in RAM
Tensor Field Network optimizations
- The last layer of each radial profile network does not add any bias in order to avoid large broadcasting operations
- The layout (order of dimensions) of the bases tensors is optimized to avoid copies to contiguous memory in the downstream TFN layers
- When Tensor Cores are available, and the output feature dimension of computed bases is odd, then it is padded with zeros to make more effective use of Tensor Cores (AMP and TF32 precisions)
- Multiple levels of fusion for TFN convolutions (and radial profiles) are provided and automatically used when conditions are met
- A low-memory mode is provided that will trade throughput for less memory use (
--low_memory)
Self-attention optimizations
- Attention keys and values are computed by a single partial TFN graph convolution in each attention layer instead of two
- Graph operations for different output degrees may be fused together if conditions are met
Normalization optimizations
- The equivariant normalization layer is optimized from multiple layer normalizations to a group normalization on fused norms when certain conditions are met
Competitive training results and analysis are provided for the following hyperparameters (identical to the ones in the original publication):
- Number of layers: 7
- Number of degrees: 4
- Number of channels: 32
- Number of attention heads: 8
- Channels division: 2
- Use of equivariant normalization: true
- Use of layer normalization: true
- Pooling: max
Feature support matrix
This model supports the following features::
| Feature | SE(3)-Transformer |
|---|---|
| Automatic mixed precision (AMP) | Yes |
| Distributed data parallel (DDP) | Yes |
Features
Distributed data parallel (DDP)
DistributedDataParallel (DDP) implements data parallelism at the module level that can run across multiple GPUs or machines.
Automatic Mixed Precision (AMP)
This implementation uses the native PyTorch AMP implementation of mixed precision training. It allows us to use FP16 training with FP32 master weights by modifying just a few lines of code. A detailed explanation of mixed precision can be found in the next section.
Mixed precision training
Mixed precision is the combined use of different numerical precisions in a computational method. Mixed precision training offers significant computational speedup by performing operations in half-precision format while storing minimal information in single-precision to retain as much information as possible in critical parts of the network. Since the introduction of Tensor Cores in NVIDIA Volta, and following with both the NVIDIA Turing and NVIDIA Ampere Architectures, significant training speedups are experienced by switching to mixed precision -- up to 3x overall speedup on the most arithmetically intense model architectures. Using mixed precision training previously required two steps:
- Porting the model to use the FP16 data type where appropriate.
- Adding loss scaling to preserve small gradient values.
AMP enables mixed precision training on NVIDIA Volta, NVIDIA Turing, and NVIDIA Ampere GPU architectures automatically. The PyTorch framework code makes all necessary model changes internally.
For information about:
- How to train using mixed precision, refer to the Mixed Precision Training paper and Training With Mixed Precision documentation.
- Techniques used for mixed precision training, refer to the Mixed-Precision Training of Deep Neural Networks blog.
- APEX tools for mixed precision training, refer to the NVIDIA Apex: Tools for Easy Mixed-Precision Training in PyTorch.
Enabling mixed precision
Mixed precision is enabled in PyTorch by using the native Automatic Mixed Precision package, which casts variables to half-precision upon retrieval while storing variables in single-precision format. Furthermore, to preserve small gradient magnitudes in backpropagation, a loss scaling step must be included when applying gradients. In PyTorch, loss scaling can be applied automatically using a GradScaler.
Automatic Mixed Precision makes all the adjustments internally in PyTorch, providing two benefits over manual operations. First, programmers need not modify network model code, reducing development and maintenance effort. Second, using AMP maintains forward and backward compatibility with all the APIs for defining and running PyTorch models.
To enable mixed precision, you can simply use the --amp flag when running the training or inference scripts.
Enabling TF32
TensorFloat-32 (TF32) is the new math mode in NVIDIA A100 GPUs for handling the matrix math, also called tensor operations. TF32 running on Tensor Cores in A100 GPUs can provide up to 10x speedups compared to single-precision floating-point math (FP32) on NVIDIA Volta GPUs.
TF32 Tensor Cores can speed up networks using FP32, typically with no loss of accuracy. It is more robust than FP16 for models that require a high dynamic range for weights or activations.
For more information, refer to the TensorFloat-32 in the A100 GPU Accelerates AI Training, HPC up to 20x blog post.
TF32 is supported in the NVIDIA Ampere GPU architecture and is enabled by default.
Glossary
Degree (type)
In the model, every feature (input, output and hidden) transforms in an equivariant way in relation to the input graph. When we define a feature, we need to choose, in addition to the number of channels, which transformation rule it obeys.
The degree or type of a feature is a positive integer that describes how this feature transforms when the input rotates in 3D.
This is related to irreducible representations of different rotation orders.
The degree of a feature determines its dimensionality. A type-d feature has a dimensionality of 2d+1.
Some common examples include:
- Degree 0: 1D scalars invariant to rotation
- Degree 1: 3D vectors that rotate according to 3D rotation matrices
- Degree 2: 5D vectors that rotate according to 5D Wigner-D matrices. These can represent symmetric traceless 3x3 matrices.
Fiber
A fiber can be viewed as a representation of a set of features of different types or degrees (positive integers), where each feature type transforms according to its rule.
In this repository, a fiber can be seen as a dictionary with degrees as keys and numbers of channels as values.
Multiplicity
The multiplicity of a feature of a given type is the number of channels of this feature.
Tensor Field Network
A Tensor Field Network is a kind of equivariant graph convolution that can combine features of different degrees and produce new ones while preserving equivariance thanks to tensor products.
Equivariance
Equivariance is a property of a function of model stating that applying a symmetry transformation to the input and then computing the function produces the same result as computing the function and then applying the transformation to the output.
In the case of SE(3)-Transformer, the symmetry group is the group of continuous roto-translations (SE(3)).
Setup
The following section lists the requirements that you need to meet in order to start training the SE(3)-Transformer model.
Requirements
This repository contains a Dockerfile which extends the PyTorch 21.07 NGC container and encapsulates some dependencies. Aside from these dependencies, ensure you have the following components:
- NVIDIA Docker
- PyTorch 21.07+ NGC container
- Supported GPUs:
For more information about how to get started with NGC containers, refer to the following sections from the NVIDIA GPU Cloud Documentation and the Deep Learning Documentation:
- Getting Started Using NVIDIA GPU Cloud
- Accessing And Pulling From The NGC Container Registry
- Running PyTorch
For those unable to use the PyTorch NGC container to set up the required environment or create your own container, refer to the versioned NVIDIA Container Support Matrix.
Quick Start Guide
To train your model using mixed or TF32 precision with Tensor Cores or FP32, perform the following steps using the default parameters of the SE(3)-Transformer model on the QM9 dataset. For the specifics concerning training and inference, refer to the Advanced section.
-
Clone the repository.
git clone https://github.com/NVIDIA/DeepLearningExamples cd DeepLearningExamples/PyTorch/DrugDiscovery/SE3Transformer -
Build the
se3-transformerPyTorch NGC container.docker build -t se3-transformer . -
Start an interactive session in the NGC container to run training/inference.
mkdir -p results docker run -it --runtime=nvidia --shm-size=8g --ulimit memlock=-1 --ulimit stack=67108864 --rm -v ${PWD}/results:/results se3-transformer:latest -
Start training.
bash scripts/train.sh -
Start inference/predictions.
bash scripts/predict.sh
Now that you have your model trained and evaluated, you can choose to compare your training results with our Training accuracy results. You can also choose to benchmark your performance to Training performance benchmark or Inference performance benchmark. Following the steps in these sections will ensure that you achieve the same accuracy and performance results as stated in the Results section.
Advanced
The following sections provide greater details of the dataset, running training and inference, and the training results.
Scripts and sample code
In the root directory, the most important files are:
Dockerfile: container with the basic set of dependencies to run SE(3)-Transformersrequirements.txt: set of extra requirements to run SE(3)-Transformersse3_transformer/data_loading/qm9.py: QM9 data loading and preprocessing, as well as bases precomputationse3_transformer/model/layers/: directory containing model architecture layersse3_transformer/model/transformer.py: main Transformer modulese3_transformer/model/basis.py: logic for computing bases matricesse3_transformer/runtime/training.py: training script, to be run as a python modulese3_transformer/runtime/inference.py: inference script, to be run as a python modulese3_transformer/runtime/metrics.py: MAE metric with support for multi-GPU synchronizationse3_transformer/runtime/loggers.py: DLLogger and W&B loggers
Parameters
The complete list of the available parameters for the training.py script contains:
General
--epochs: Number of training epochs (default:100for single-GPU)--batch_size: Batch size (default:240)--seed: Set a seed globally (default:None)--num_workers: Number of dataloading workers (default:8)--amp: Use Automatic Mixed Precision (defaultfalse)--gradient_clip: Clipping of the gradient norms (default:None)--accumulate_grad_batches: Gradient accumulation (default:1)--ckpt_interval: Save a checkpoint every N epochs (default:-1)--eval_interval: Do an evaluation round every N epochs (default:1)--silent: Minimize stdout output (default:false)
Paths
--data_dir: Directory where the data is located or should be downloaded (default:./data)--log_dir: Directory where the results logs should be saved (default:/results)--save_ckpt_path: File where the checkpoint should be saved (default:None)--load_ckpt_path: File of the checkpoint to be loaded (default:None)
Optimizer
--optimizer: Optimizer to use (default:adam)--learning_rate: Learning rate to use (default:0.002for single-GPU)--momentum: Momentum to use (default:0.9)--weight_decay: Weight decay to use (default:0.1)
QM9 dataset
--task: Regression task to train on (default:homo)--precompute_bases: Precompute bases at the beginning of the script during dataset initialization, instead of computing them at the beginning of each forward pass (default:false)
Model architecture
--num_layers: Number of stacked Transformer layers (default:7)--num_heads: Number of heads in self-attention (default:8)--channels_div: Channels division before feeding to attention layer (default:2)--pooling: Type of graph pooling (default:max)--norm: Apply a normalization layer after each attention block (default:false)--use_layer_norm: Apply layer normalization between MLP layers (default:false)--low_memory: If true, will use fused ops that are slower but use less memory (expect 25 percent less memory). Only has an effect if AMP is enabled on NVIDIA Volta GPUs or if running on Ampere GPUs (default:false)--num_degrees: Number of degrees to use. Hidden features will have types [0, ..., num_degrees - 1] (default:4)--num_channels: Number of channels for the hidden features (default:32)
Command-line options
To show the full list of available options and their descriptions, use the -h or --help command-line option, for example: python -m se3_transformer.runtime.training --help.
Dataset guidelines
Demo dataset
The SE(3)-Transformer was trained on the QM9 dataset.
The QM9 dataset is hosted on DGL servers and downloaded (38MB) automatically when needed. By default, it is stored in the ./data directory, but this location can be changed with the --data_dir argument.
The dataset is saved as a qm9_edge.npz file and converted to DGL graphs at runtime.
As input features, we use:
- Node features (6D):
- One-hot-encoded atom type (5D) (atom types: H, C, N, O, F)
- Number of protons of each atom (1D)
- Edge features: one-hot-encoded bond type (4D) (bond types: single, double, triple, aromatic)
- The relative positions between adjacent nodes (atoms)
Custom datasets
To use this network on a new dataset, you can extend the DataModule class present in se3_transformer/data_loading/data_module.py.
Your custom collate function should return a tuple with:
- A (batched) DGLGraph object
- A dictionary of node features ({‘{degree}’: tensor})
- A dictionary of edge features ({‘{degree}’: tensor})
- (Optional) Precomputed bases as a dictionary
- Labels as a tensor
You can then modify the training.py and inference.py scripts to use your new data module.
Training process
The training script is se3_transformer/runtime/training.py, to be run as a module: python -m se3_transformer.runtime.training.
Logs
By default, the resulting logs are stored in /results/. This can be changed with --log_dir.
You can connect your existing Weights & Biases account by setting the WANDB_API_KEY environment variable.
Checkpoints
The argument --save_ckpt_path can be set to the path of the file where the checkpoints should be saved.
--ckpt_interval can also be set to the interval (in the number of epochs) between checkpoints.
Evaluation
The evaluation metric is the Mean Absolute Error (MAE).
--eval_interval can be set to the interval (in the number of epochs) between evaluation rounds. By default, an evaluation round is performed after each epoch.
Automatic Mixed Precision
To enable Mixed Precision training, add the --amp flag.
Multi-GPU and multi-node
The training script supports the PyTorch elastic launcher to run on multiple GPUs or nodes. Refer to the official documentation.
For example, to train on all available GPUs with AMP:
python -m torch.distributed.run --nnodes=1 --nproc_per_node=gpu --module se3_transformer.runtime.training --amp
Inference process
Inference can be run by using the se3_transformer.runtime.inference python module.
The inference script is se3_transformer/runtime/inference.py, to be run as a module: python -m se3_transformer.runtime.inference. It requires a pre-trained model checkpoint (to be passed as --load_ckpt_path).
Performance
The performance measurements in this document were conducted at the time of publication and may not reflect the performance achieved from NVIDIA’s latest software release. For the most up-to-date performance measurements, go to NVIDIA Data Center Deep Learning Product Performance.
Benchmarking
The following section shows how to run benchmarks measuring the model performance in training and inference modes.
Training performance benchmark
To benchmark the training performance on a specific batch size, run bash scripts/benchmarck_train.sh {BATCH_SIZE} for single GPU, and bash scripts/benchmarck_train_multi_gpu.sh {BATCH_SIZE} for multi-GPU.
Inference performance benchmark
To benchmark the inference performance on a specific batch size, run bash scripts/benchmarck_inference.sh {BATCH_SIZE}.
Results
The following sections provide details on how we achieved our performance and accuracy in training and inference.
Training accuracy results
Training accuracy: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the scripts/train.sh training script in the PyTorch 21.07 NGC container on NVIDIA DGX A100 (8x A100 80GB) GPUs.
| GPUs | Batch size / GPU | Absolute error - TF32 | Absolute error - mixed precision | Time to train - TF32 | Time to train - mixed precision | Time to train speedup (mixed precision to TF32) |
|---|---|---|---|---|---|---|
| 1 | 240 | 0.03456 | 0.03460 | 1h23min | 1h03min | 1.32x |
| 8 | 240 | 0.03417 | 0.03424 | 15min | 12min | 1.25x |
Training accuracy: NVIDIA DGX-1 (8x V100 16GB)
Our results were obtained by running the scripts/train.sh training script in the PyTorch 21.07 NGC container on NVIDIA DGX-1 with (8x V100 16GB) GPUs.
| GPUs | Batch size / GPU | Absolute error - FP32 | Absolute error - mixed precision | Time to train - FP32 | Time to train - mixed precision | Time to train speedup (mixed precision to FP32) |
|---|---|---|---|---|---|---|
| 1 | 240 | 0.03432 | 0.03439 | 2h25min | 1h33min | 1.56x |
| 8 | 240 | 0.03380 | 0.03495 | 29min | 20min | 1.45x |
Training performance results
Training performance: NVIDIA DGX A100 (8x A100 80GB)
Our results were obtained by running the scripts/benchmark_train.sh and scripts/benchmark_train_multi_gpu.sh benchmarking scripts in the PyTorch 21.07 NGC container on NVIDIA DGX A100 with 8x A100 80GB GPUs. Performance numbers (in molecules per millisecond) were averaged over five entire training epochs after a warmup epoch.
| GPUs | Batch size / GPU | Throughput - TF32 [mol/ms] | Throughput - mixed precision [mol/ms] | Throughput speedup (mixed precision - TF32) | Weak scaling - TF32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|---|
| 1 | 240 | 2.21 | 2.92 | 1.32x | ||
| 1 | 120 | 1.81 | 2.04 | 1.13x | ||
| 8 | 240 | 17.15 | 22.95 | 1.34x | 7.76 | 7.86 |
| 8 | 120 | 13.89 | 15.62 | 1.12x | 7.67 | 7.66 |
To achieve these same results, follow the steps in the Quick Start Guide.
Training performance: NVIDIA DGX-1 (8x V100 16GB)
Our results were obtained by running the scripts/benchmark_train.sh and scripts/benchmark_train_multi_gpu.sh benchmarking scripts in the PyTorch 21.07 NGC container on NVIDIA DGX-1 with 8x V100 16GB GPUs. Performance numbers (in molecules per millisecond) were averaged over five entire training epochs after a warmup epoch.
| GPUs | Batch size / GPU | Throughput - FP32 [mol/ms] | Throughput - mixed precision [mol/ms] | Throughput speedup (FP32 - mixed precision) | Weak scaling - FP32 | Weak scaling - mixed precision |
|---|---|---|---|---|---|---|
| 1 | 240 | 1.25 | 1.88 | 1.50x | ||
| 1 | 120 | 1.03 | 1.41 | 1.37x | ||
| 8 | 240 | 9.33 | 14.02 | 1.50x | 7.46 | 7.46 |
| 8 | 120 | 7.39 | 9.41 | 1.27x | 7.17 | 6.67 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance results
Inference performance: NVIDIA DGX A100 (1x A100 80GB)
Our results were obtained by running the scripts/benchmark_inference.sh inferencing benchmarking script in the PyTorch 21.07 NGC container on NVIDIA DGX A100 with 1x A100 80GB GPU.
FP16
| Batch size | Throughput Avg [mol/ms] | Latency Avg [ms] | Latency 90% [ms] | Latency 95% [ms] | Latency 99% [ms] |
|---|---|---|---|---|---|
| 1600 | 11.60 | 140.94 | 138.29 | 140.12 | 386.40 |
| 800 | 10.74 | 75.69 | 75.74 | 76.50 | 79.77 |
| 400 | 8.86 | 45.57 | 46.11 | 46.60 | 49.97 |
TF32
| Batch size | Throughput Avg [mol/ms] | Latency Avg [ms] | Latency 90% [ms] | Latency 95% [ms] | Latency 99% [ms] |
|---|---|---|---|---|---|
| 1600 | 8.58 | 189.20 | 186.39 | 187.71 | 420.28 |
| 800 | 8.28 | 97.56 | 97.20 | 97.73 | 101.13 |
| 400 | 7.55 | 53.38 | 53.72 | 54.48 | 56.62 |
To achieve these same results, follow the steps in the Quick Start Guide.
Inference performance: NVIDIA DGX-1 (1x V100 16GB)
Our results were obtained by running the scripts/benchmark_inference.sh inferencing benchmarking script in the PyTorch 21.07 NGC container on NVIDIA DGX-1 with 1x V100 16GB GPU.
FP16
| Batch size | Throughput Avg [mol/ms] | Latency Avg [ms] | Latency 90% [ms] | Latency 95% [ms] | Latency 99% [ms] |
|---|---|---|---|---|---|
| 1600 | 6.42 | 254.54 | 247.97 | 249.29 | 721.15 |
| 800 | 6.13 | 132.07 | 131.90 | 132.70 | 140.15 |
| 400 | 5.37 | 75.12 | 76.01 | 76.66 | 79.90 |
FP32
| Batch size | Throughput Avg [mol/ms] | Latency Avg [ms] | Latency 90% [ms] | Latency 95% [ms] | Latency 99% [ms] |
|---|---|---|---|---|---|
| 1600 | 3.39 | 475.86 | 473.82 | 475.64 | 891.18 |
| 800 | 3.36 | 239.17 | 240.64 | 241.65 | 243.70 |
| 400 | 3.17 | 126.67 | 128.19 | 128.82 | 130.54 |
To achieve these same results, follow the steps in the Quick Start Guide.
Release notes
Changelog
August 2021
- Initial release
Known issues
If you encounter OSError: [Errno 12] Cannot allocate memory during the Dataloader iterator creation (more precisely during the fork(), this is most likely due to the use of the --precompute_bases flag. If you cannot add more RAM or Swap to your machine, it is recommended to turn off bases precomputation by removing the --precompute_bases flag or using --precompute_bases false.