mirror of
https://github.com/uhi22/pyPLC.git
synced 2024-11-10 01:05:42 +00:00
122 lines
6.3 KiB
Markdown
122 lines
6.3 KiB
Markdown
# Some try-outs with Python and network adaptor low-level communiation
|
|
|
|
## Goal
|
|
This project tries to use cheap powerline network adaptors for communication with electric cars charging system.
|
|
|
|
There are three different use cases, where this project can be helpful:
|
|
1. Sniffing the traffic between an CCS charger and a car. For instance to measure which side is the limiting element for reduced charging power.
|
|
2. Building a charger for CCS or for AC with digital communication.
|
|
3. Building a charging unit for a car which does not support powerline communication.
|
|
|
|
## References
|
|
* [i] https://www.goingelectric.de/wiki/CCS-Technische-Details/
|
|
* [ii] https://openinverter.org/forum/viewtopic.php?p=37085#p37085
|
|
|
|
## Quick start / overview
|
|
- Modify a PLC adaptor hardware, that it runs on battery
|
|
- Modify the configuration of the PLC adaptor, that it supports HomePlug Green Phy including the SLAC.
|
|
- Install wireshark to view the network traffic
|
|
- Install Pcap-ct python library
|
|
- Patch Pcap-ct to support non-blocking operation
|
|
|
|
## Hardware preparation
|
|
Tested device: TPlink TL-PA1040P Ver 5.0
|
|
- remove the housing
|
|
- remove the AC power connector parts
|
|
- connect cables to supply the device by battery. Works with 12V, also works with 5V from an USB power bank.
|
|
- connect cables and circuit (1nF and 150ohms in series) for connecting to the pilot line.
|
|
|
|
## Configuration of the PLC adaptor
|
|
The factory settings of the Homeplug PLC adaptor do not in all cases support the requirements of the communication
|
|
with the car. In detail, the adaptors are supporting HomePlugAV, but we need HomePlugGP (Green Phy). This is similar,
|
|
but not the same.
|
|
Fortunately, the supplier of the chipset is aware of this topic, and provides some smart helper tools.
|
|
http://github.com/qca/open-plc-utils
|
|
It is worth to read its documentation, starting in docbook/index.html, this contains all what we need for the next steps.
|
|
|
|
(Tested on Linux/Raspbian on a raspberryPi 3)
|
|
|
|
Find the PLC adaptor
|
|
```
|
|
pi@RPi3D:~ $ int6klist -ieth0 -v
|
|
```
|
|
This shows the software version and the mac address.
|
|
|
|
Read the configuration from the PLC adaptor and write it to a file
|
|
```
|
|
pi@RPi3D:~ $ plctool -ieth0 -p original.pib 98:48:27:5A:3C:E6
|
|
eth0 98:48:27:5A:3C:E6 Read Module from Memory
|
|
```
|
|
Patch the configuration file (aee /docbook/ch05s15.html). For each side (pev (vehicle) and evse (charger)) there is a special configuration.
|
|
Example pev side:
|
|
```
|
|
pi@RPi3D:~ $ cp original.pib pev.pib
|
|
pi@RPi3D:~ $ setpib pev.pib 74 hfid "PEV"
|
|
pi@RPi3D:~ $ setpib pev.pib F4 byte 1
|
|
pi@RPi3D:~ $ setpib pev.pib 1653 byte 1
|
|
pi@RPi3D:~ $ setpib pev.pib 1C98 long 10240 long 102400
|
|
```
|
|
Write the configuration file to the PLC adaptor
|
|
```
|
|
pi@RPi3D:~ $ plctool -ieth0 -P pev.pib 98:48:27:5A:3C:E6
|
|
eth0 98:48:27:5A:3C:E6 Start Module Write Session
|
|
eth0 98:48:27:5A:3C:E6 Flash pev.pib
|
|
...
|
|
eth0 98:48:27:5A:3C:E6 Close Session
|
|
eth0 98:48:27:5A:3C:E6 Reset Device
|
|
eth0 98:48:27:5A:3C:E6 Resetting ...
|
|
```
|
|
The open-plc-utils contain the programs evse and pev, which can be used for try-out of the functionality, using two PLC adaptors.
|
|
|
|
## Installation / Preconditions on PC side
|
|
### Usage on Windows10
|
|
|
|
1. Install python (windows automatically launches the installer if you type „python“ into the search field of the task bar)
|
|
2. Wireshark is already installed, this includes the pcap driver, which is necessary for low-level-network-interaction
|
|
|
|
Attention: There are (at least) three different python-libs available for pcap:
|
|
- Libpcap
|
|
- Pylibpcap (But: only Python2)
|
|
- Pypcap (recommented on https://stackoverflow.com/questions/63941109/pcap-open-live-issue)
|
|
- Pcap-ct (https://pypi.org/project/pcap-ct/)
|
|
We use the last one.
|
|
python -m pip install --upgrade pcap-ct
|
|
This is fighting against the Libpcap-installation, so we need to deinstall the second:
|
|
python -m pip uninstall libpcap
|
|
Then again install pcap-ct, and finally add in the libpcap\_platform\__init__py the missing is_osx = False. (Is in the meanwhile fixed in the github repository.)
|
|
|
|
Finally, we need to patch the Pcap-ct, because the python script needs a non-blocking version. This is discussed in https://github.com/karpierz/pcap-ct/issues/9
|
|
|
|
Now, in the IDLE shall 3.10.6, the import works:
|
|
```
|
|
import pcap
|
|
sniffer = pcap.pcap(name=None, promisc=True, immediate=True, timeout_ms=50)
|
|
addr = lambda pkt, offset: '.'.join(str(pkt[i]) for i in range(offset, offset + 4))
|
|
for ts, pkt in sniffer:
|
|
print('%d\tSRC %-16s\tDST %-16s' % (ts, addr(pkt, sniffer.dloff + 12), addr(pkt, sniffer.dloff + 16)))
|
|
```
|
|
|
|
### Usage on Raspberry
|
|
Pcap-ct does not work with Python 3.4. After update to Python 3.8, it works.
|
|
|
|
|
|
## Change history / functional status
|
|
### 2022-10-19 Communication with Ioniq car established
|
|
* Using a TPlink TL-PA4010P with firmware MAC-QCA7420-1.4.0.20-00-20171027-CS and the PIB configuration file patched for evse according to the open-plc-utils docu.
|
|
* Python software running on Win10, Python 3.10.8
|
|
* On control pilot, sending 5% PWM to initiate digital communication with the car
|
|
* Since the TPlink is configured as coordinator, it sends "alive" messages, and the IONIQ starts sending the SLAC_PARAM.REQ.
|
|
* Per keystroke, we trigger a SET_KEY before the car is connected. The TPlink responds with "rejected", but this is normal, the LEDs are turning off and on, key is accepted.
|
|
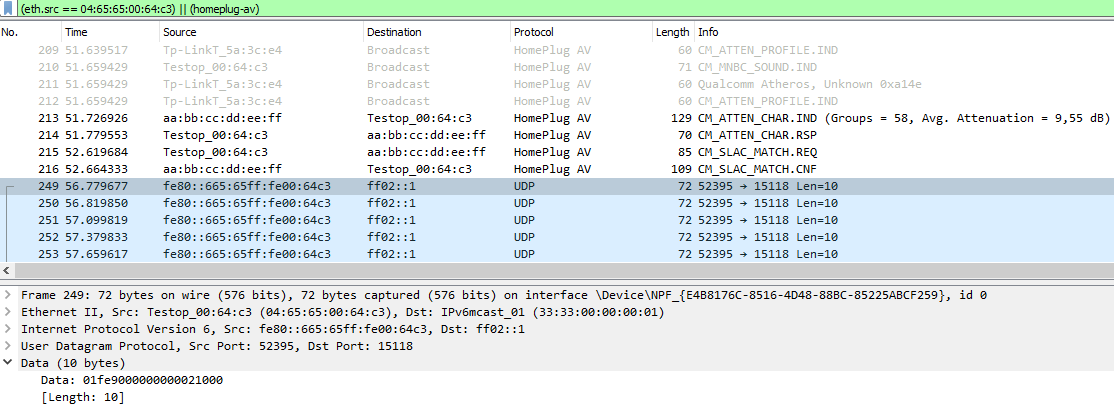
* Python script interprets the relevant incoming messages (SLAC_PARAM.REQ, MNBC_SOUND.IND, SLAC_MATCH.REQ) and reacts accordingly.
|
|
* After successfull SLAC sequence, all three LEDs on the TPlink are ON, means: Network is established.
|
|
* In wireshark, we see that the car is sending UDP multicast messages to destination port 15118. This looks like a good sign, that it wants a ISO15118 compatible communication.
|
|
|
|
|
|
### 2022-10-19 Sniffing mode not yet working with the TPlink adaptors
|
|
* with a Devolo dLAN 200 AVplus, software INT6000-MAC-4-4-4405-00-4497-20101201-FINAL-B in original parametrization, it is possible
|
|
to see the complete SLAC traffic (both directions) which sniffing the communication between a real charger and a real car. This does
|
|
NOT work with the TPlink adaptors. They route only "their own" direction of the traffic to the ethernet. Means: The pev-configured device
|
|
does not see the real car, and the evse-configured device does not see the real charger. This is bad for sniffing.
|
|
|
|
|
|
(further steps ongoing)
|